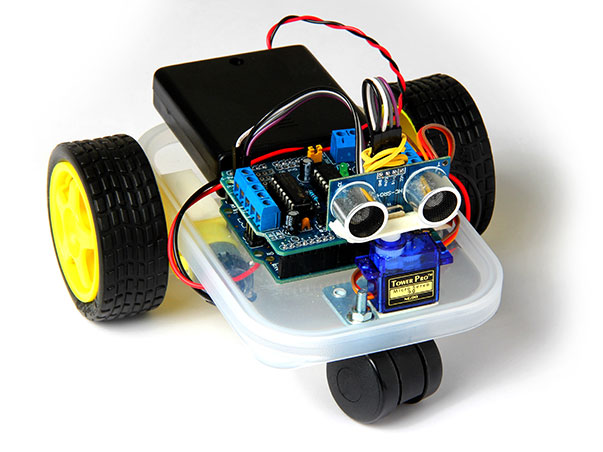
Finalmente con los conocimientos anteriores, se crea un robot que funciona como carrito son un sensor de proximidad al frente, para detectar paredes y evitar choques y a la vez sobre un Servomotor que lo mueve en diferentes ángulos para una lectura de toda su zona frontal.
Inferiormente, el motor que hace girar las ruedas, y todo esto ensamblado sobre la placa Arduino uno, ya con el código funcionando.

No hay comentarios:
Publicar un comentario